Robot System
Takahashi Lab Robot System Project
JST CREST 文脈と解釈の同時推定に基づく相互理解コンピューテーションの実現
ロボットの自己位置と地図を作るSLAMアルゴリズムに注目し、文脈と発話語の意味を同時推定できるSimultaneous Contextualization And INterpreting (SCAIN)を実現する。SCAINの特性を利用することで、低ストレスなマルチモーダル対話システム、人同士の相互理解システムを実現し、人間主導のインタラクションを扱えるコンピュータの構築方法を明らかにする。本研究室は、人とロボットのインタラクション、環境とロボットの関係に注目し、ロボットが自分の状態や周囲の状況に応じて自ら考えて行動するアルゴリズムの開発と実装を目指しています。
 |
 |
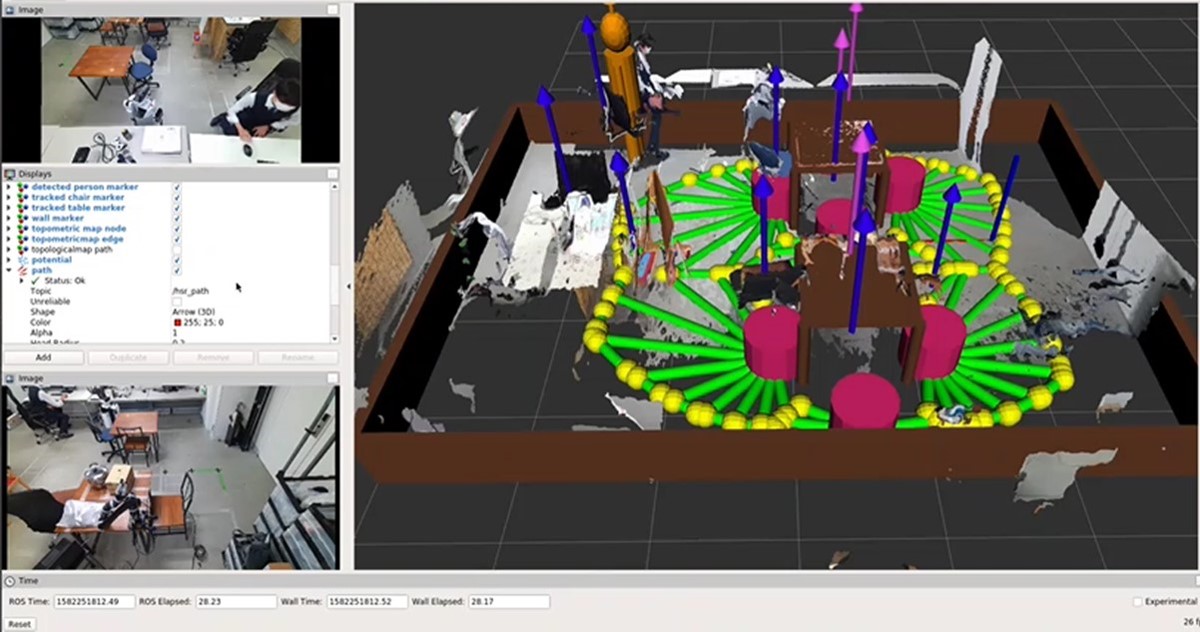
ASTRON: Action-based Spatio-Temporal Robot Navigation [IEEE Access]
| Action Graphは、認識した環境と環境中の物体情報からロボットがその環境内のどこでどのような行動が実行可能であるかを表現した新しい環境表現手法です。Action
Graphではロボットが行動することで環境がどのように変化するかも考慮しています。Action Graphに基づいてロボットはいつ、どこで、どのように行動するかを計画することができます。 |
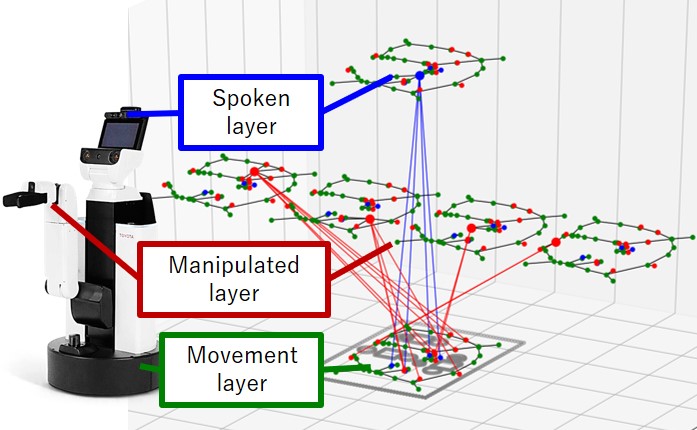
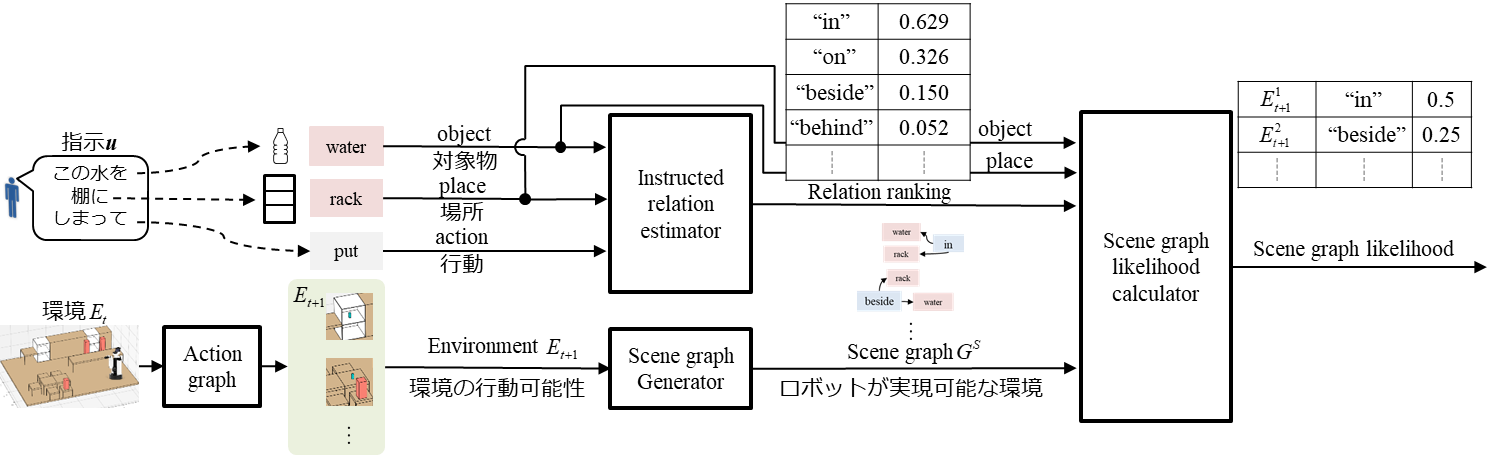
ロボットの行動可能性に基づいた自然言語指示の目標状態推定 [RSJ2021]
人から与えられた言語的な指令をAction Graphを活用してロボットが環境内で実行可能な行動の組合せとして解釈する新しいヒューマンロボットインタラクションの研究に応用しています。
動作経験に基づく動画像予測と動作コストの学習による自律移動ロボットの行動生成 [JINT]
|
|
動作教示による確率的学習と合成に基づくお茶の摘み取り [RA-L][ICRA2020]
Plucking Motions for Tea Harvesting Robots Using Probabilistic Movement
Primitives
|
人間の意思決定と動作の制約を考慮した操作支援 [RSJ2020]
|
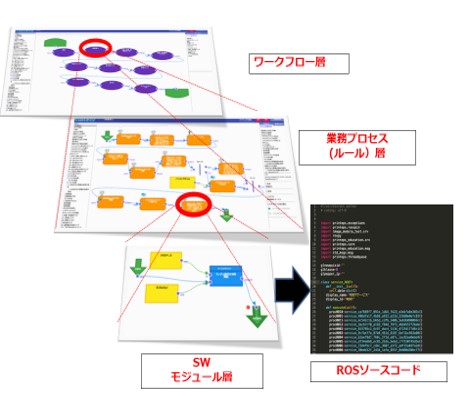
JST CREST 実践知能アプリケーション構築フレームワークPRINTEPSの開発と社会実践 website
本プロジェクトでは、知識ベース推論、音声対話、画像センシング、動作計画、機械学習の統合知能アプリケーションをエンドユーザが容易にデザイン・開発できるプラットフォームPRINTEPS(PRactical INTElligent aPplicationS)の研究開発およびロボット喫茶店と教諭ロボット連携授業の適用実践を進めています。本研究室では、動作計画、機械学習を中心に人とインタラクションすることを強く意識した新しいアルゴリズムの提案と実践に関する研究をしています。
 |
 |
 |
NEDO戦略的先端ロボット要素技術開発プロジェクト
村田機械株式会社と産業技術総合研究所と共同で、病院や公共空間など人との共存環境下で稼働する全方向自律搬送ロボット「MKR-003」の開発しています。SLAM技術を用いた簡易な導入作業、スムーズな障害物回避、エレベータを利用した複数フロア間の移動が可能であることが特徴です。
 |
 |
 |